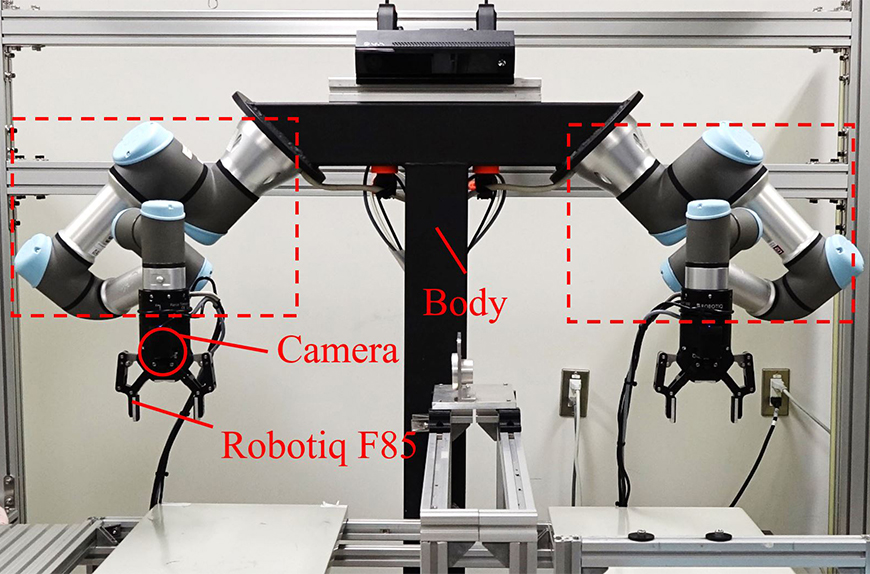
UR雙臂機器人的兩個手臂,既可以單獨運行,也可以協同工作。從技術特點來說,優傲雙臂機器人是由UR3/UR3e、UR5/UR5e、UR10/UR10e、UR16e任意兩款或者同一款的兩臺機械臂組成,用戶可以根據實際生產需要選擇不同的機械臂進行搭配。同時,雙臂協作應用支持任意角度安裝,可以滿足不同空間和負載的需求,具有非常高的靈活性;結合URCap 雙臂插件和標定軟件即可實現雙臂共享坐標系,協同操作。一個工作站讓用戶有了多種選擇,提高了設備利用率,可以最大程度實現柔性生產。
獲取更多信息:15814107663 立即咨詢>>
立即咨詢>>
本方案資源擴展性強,可根據不同需求進行合理搭配,詳細信息可咨詢我公司銷售或技術人員。
| 序號 | 品牌 | 型號 | 數量 | 備注 |
| 1 | 優傲機器人 | UR5機器人 | 2 | 機器人系統版本號要求Version 3.2.x.x及后續版本 |
| 2 | 工業級交換機或者路由器 | 至少3個網口 | 1 | IP防護等級根據具體的應用需求定 |
| 3 | Cat7類屏蔽網線 | 3 | ||
| 4 | 24V信號線 | 5 | ||
| 5 | 法蘭鏈接件 | 機加工 | 1 | 固定兩臺機器人的法蘭(標定用),無需標定則不需要 |
2、機械安裝
兩臺機器人的機械安裝分別按照單臺UR機器人的安裝標準進行,相關部分請參考對應UR機器人的安裝指南。
3、Emergency信號線連接與配置
雙臂機器人作為一個整體,緊急停止(急停)信號需要共享,即觸發任意一個急停信號,另外一臺機器人有需停止。若應用中只有雙臂UR機器人則只需進行如下a,c,d步,若還有外圍設備(如安全PLC)或者急停按鈕需要連接,則進行如下第a-d步。
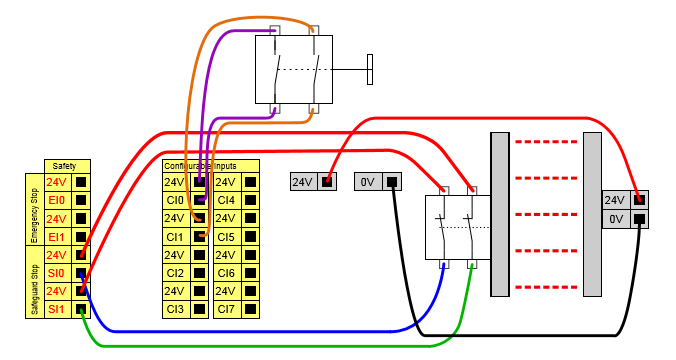
a)兩臺UR機器人急停信號線連接,圖2。
b)與外圍設備或外部急停按鈕的連接,圖3。
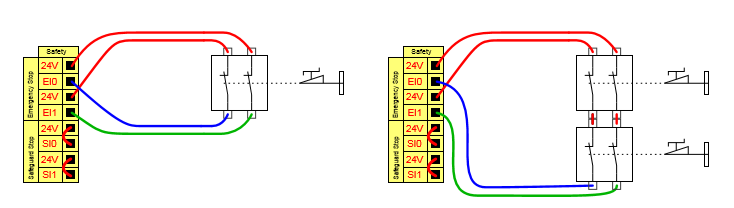
c)在一些應用中需要使用Safeguard stop,與急停不同,UR機器人不提供Safeguard stop的數字輸出信號,因此需要采用多聯開關(兩臺UR機器人需4聯開關)同時連接兩臺UR機器人,圖5為單臺UR機器人的Safeguard stop 連接圖。
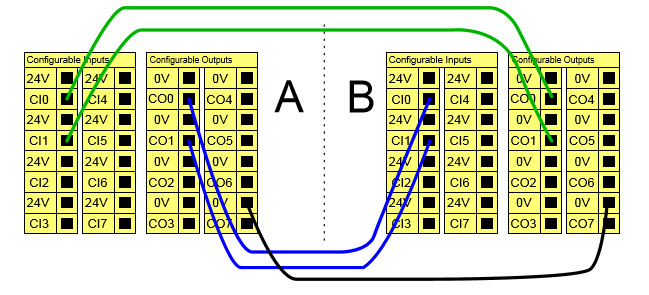
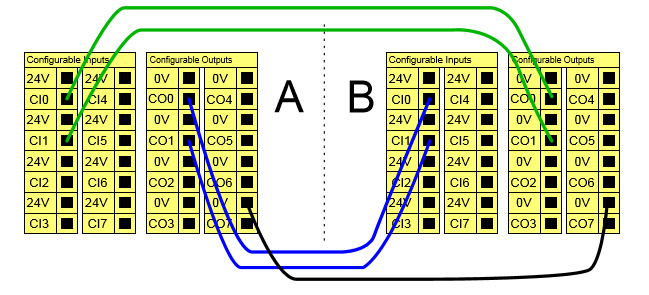
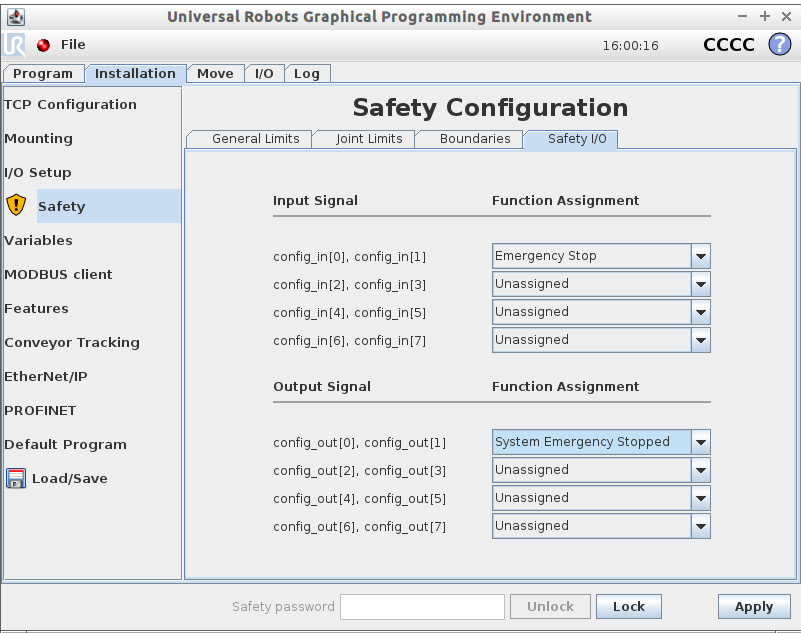
d)急停信號連接好后需要在示教器上安裝設置中對Configurable IO進行配置,圖6。
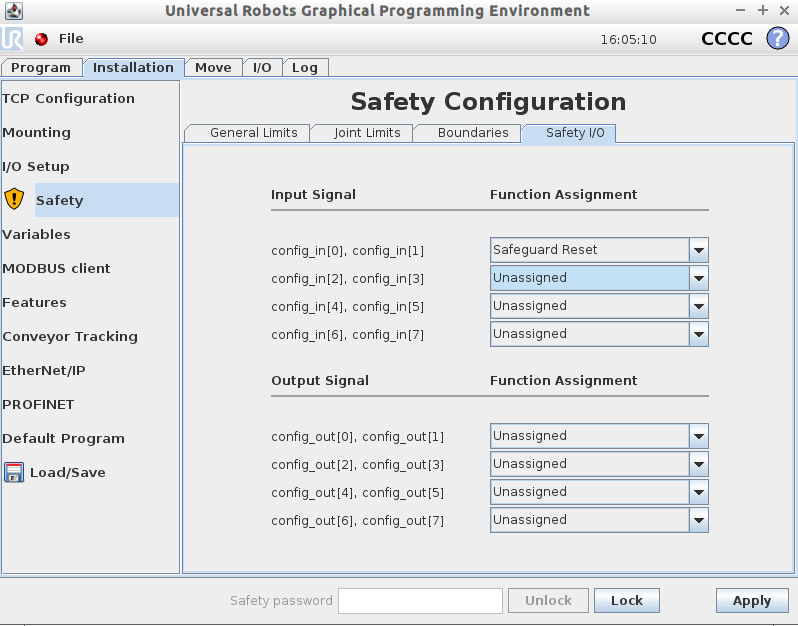
如進行了Safeguard stop的連接,那么復位的操作可以通過配置Configurable IO為Safeguard reset 完成,圖7。
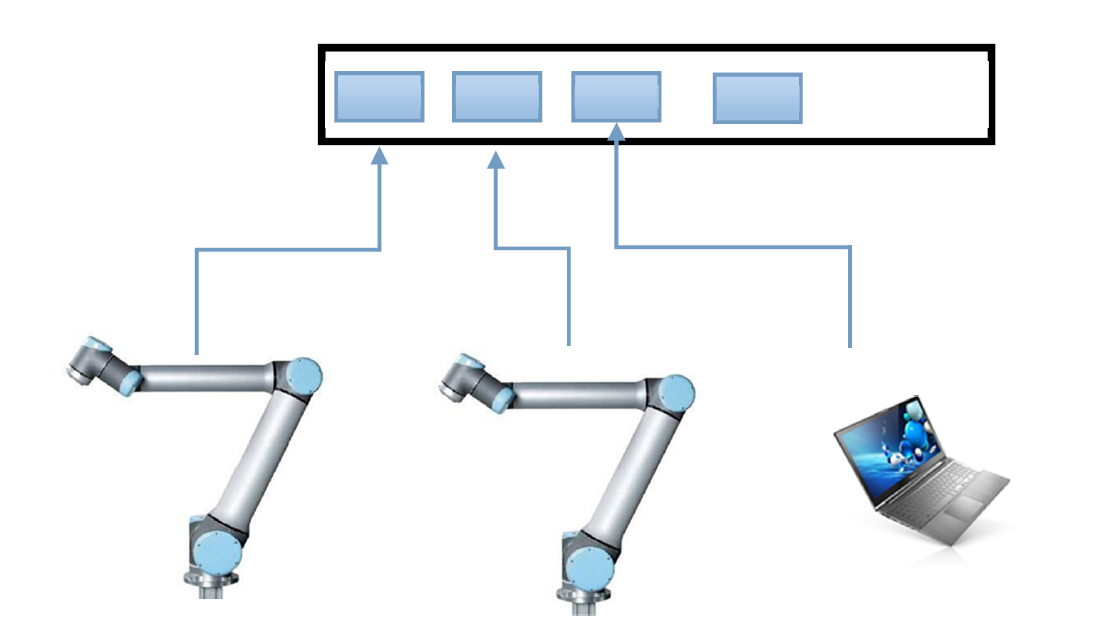
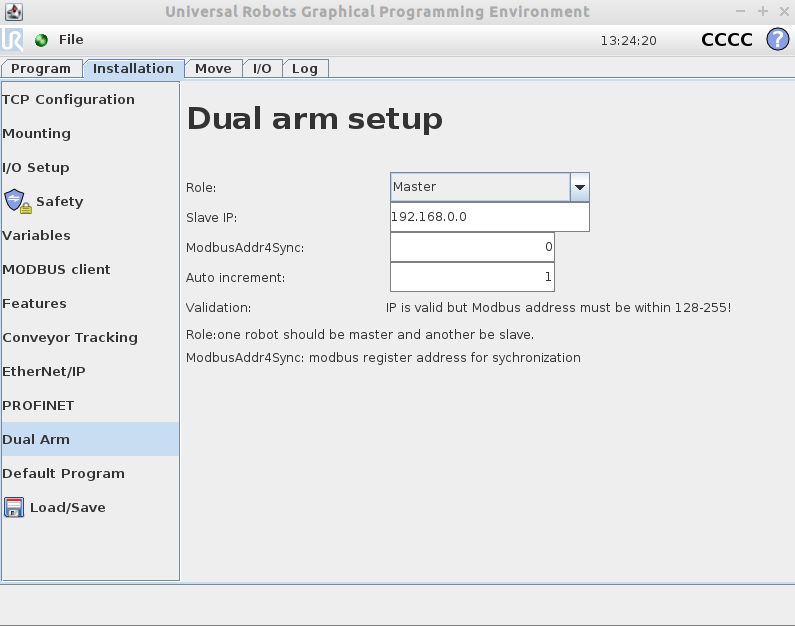
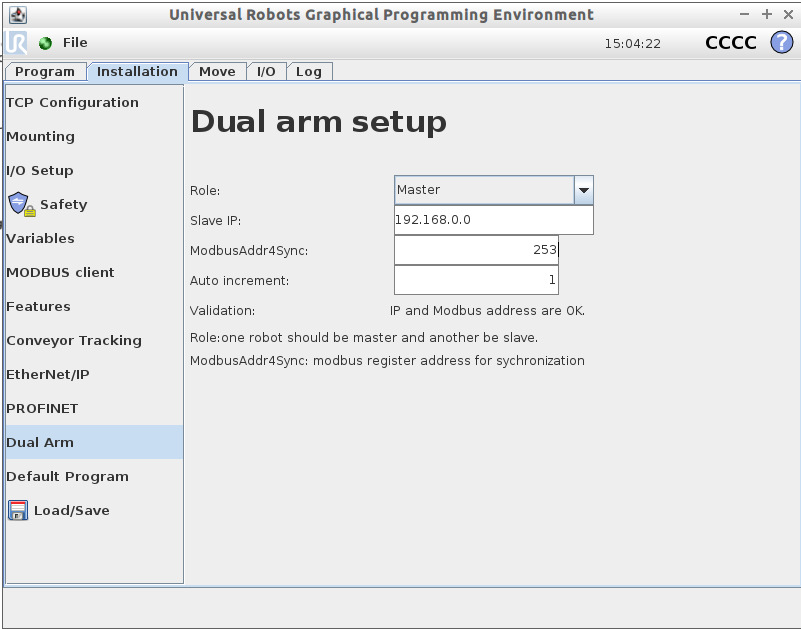
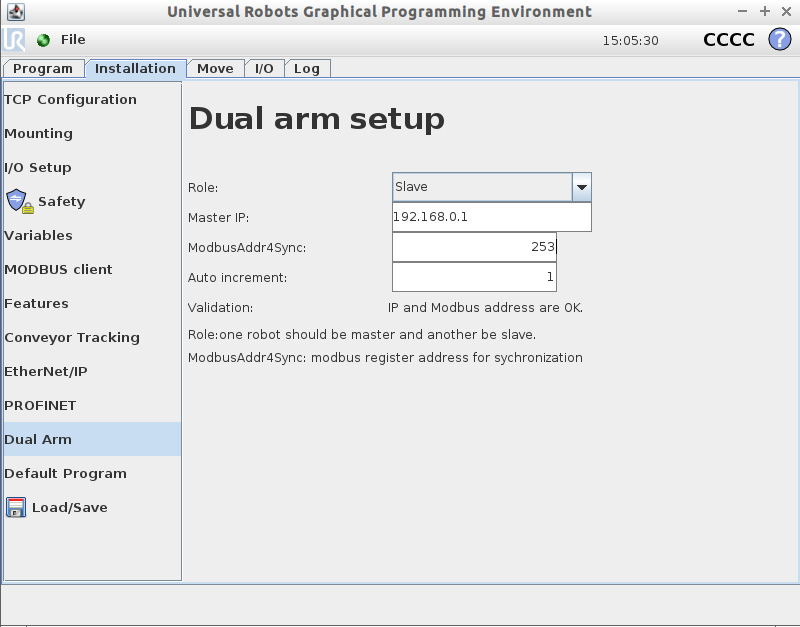
4、網絡連接與配置
兩臺UR5機器人協同通訊通過Modbus-TCP通訊實現,因此需要將兩臺控制器通過網絡信號線鏈接起來。考慮到調試方便或者與外圍設備的通訊需求,交換機或路由器至少有三個網口,兩臺UR5機器人設置在同一個網段,連接圖如圖8。
5、雙臂標定
雙臂標定流程是連接兩臺UR機器人的法蘭,通過一臺拖動另外一臺機器人到不同姿態,解算出從機器人基坐標在主機器人基座標下的位姿以及從機器人TCP坐標系在主機器人TCP坐標系下的位姿。兩臺機器人法蘭的連接不限定具體的形式,但是需盡量保證其相互作用力的力臂較短(雖然標定軟件會自動讓負載更大的機器人拖動負載小的,但是力臂太長可能還是無法拖動),法蘭之間連接穩固即可(圖9為一種參考設計)。
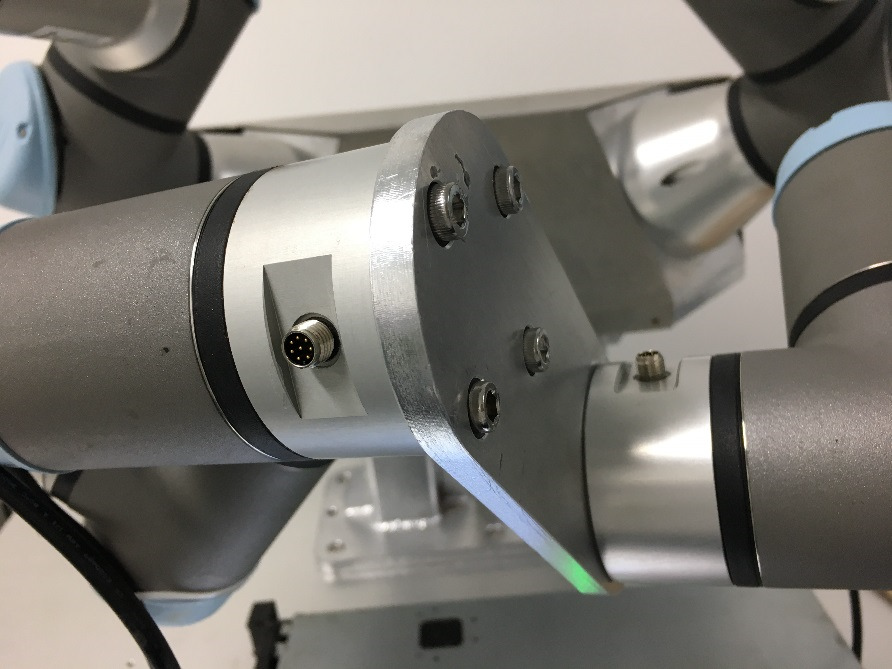
1)使用法蘭連接固定兩個法蘭;
2)利用一臺機器人平面特征(共享坐標系);首先定義針尖TCP,然后通過針尖TCP,定義平面特征,如圖10。

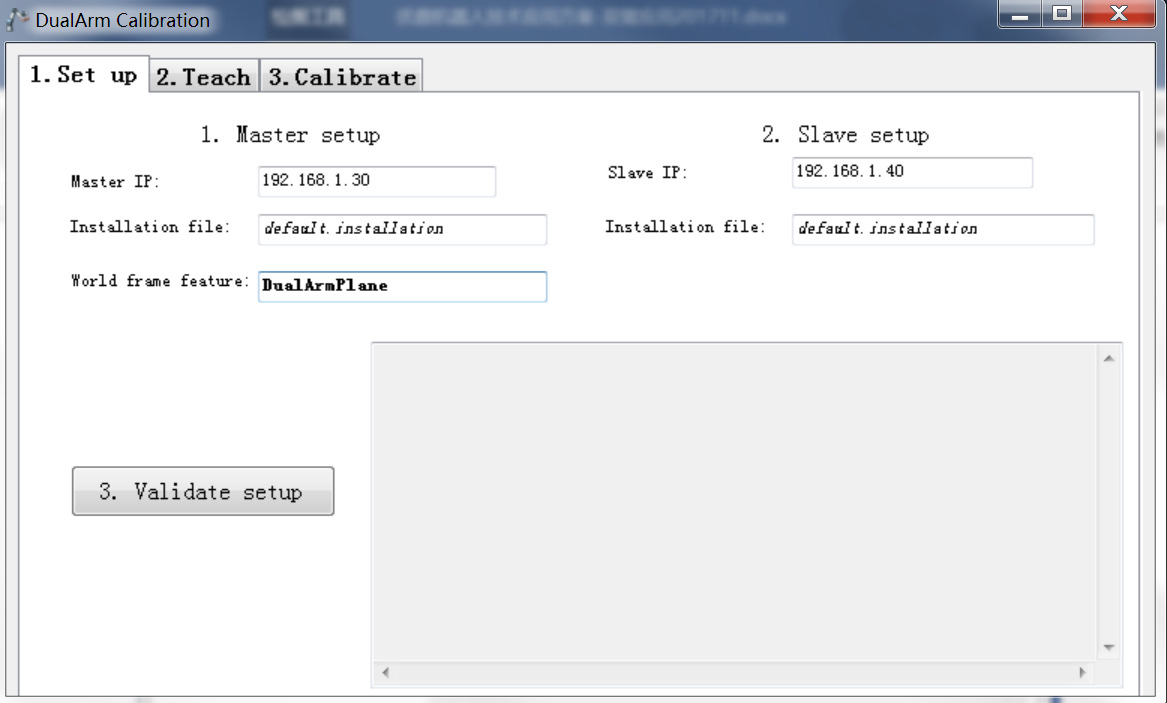
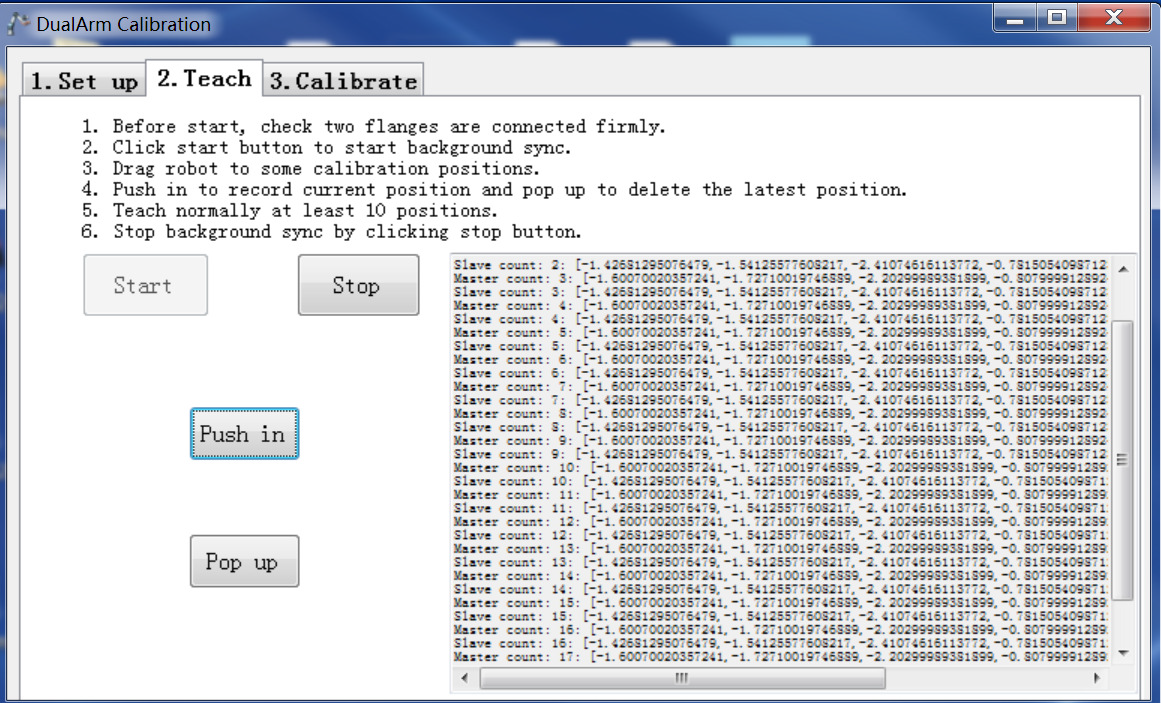
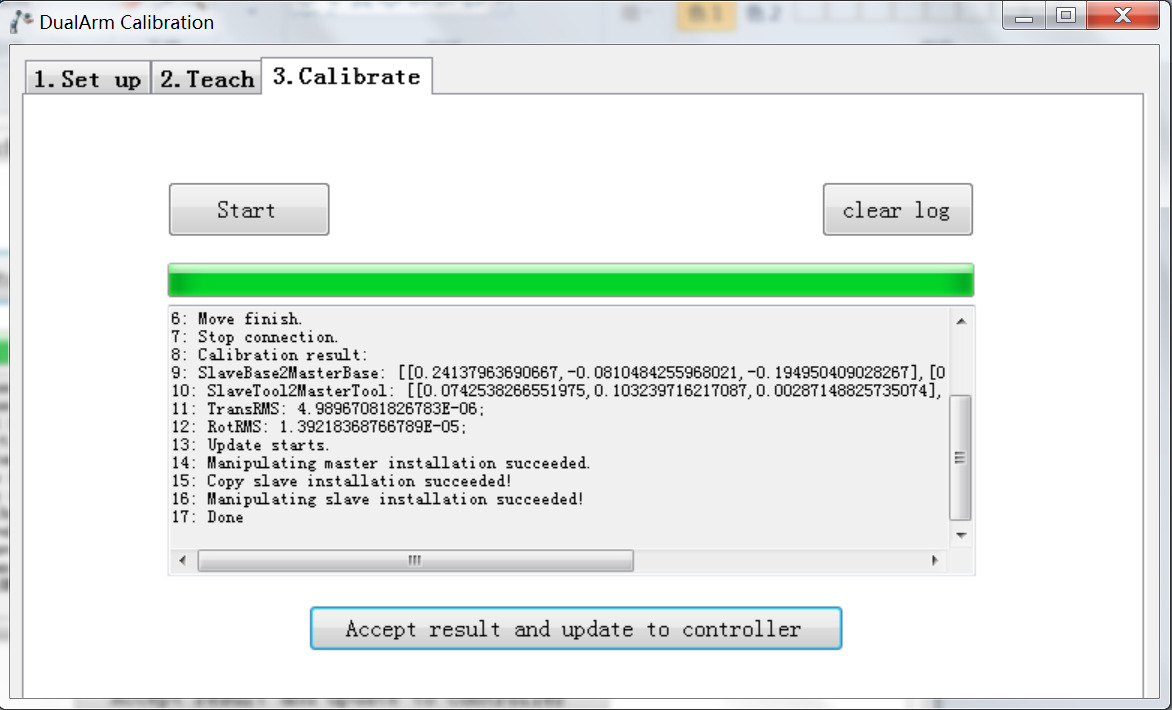
3)啟動 DualArmCalibration.exe程序,其中Master就是步驟2中定義共享坐標系的主機器人,其安裝設置文件是包含有這個坐標系的文件;Slave的安裝設置文件則是從機器人標定結束后以此為基礎添加 DualArm_Plane平面特征的文件;設置完成之后,點擊Validate setup 按鈕,如果顯示成功,那么即可進入第二個選項頁 Tecah。
 |  |
| (1) | (2) |
 |  |
| (3) | (4) |
Links:: 優傲機器人官網
Copyright © 東莞市庫崎智能科技 版權所有 粵ICP備:17066985號 技術支持:麥田網絡