
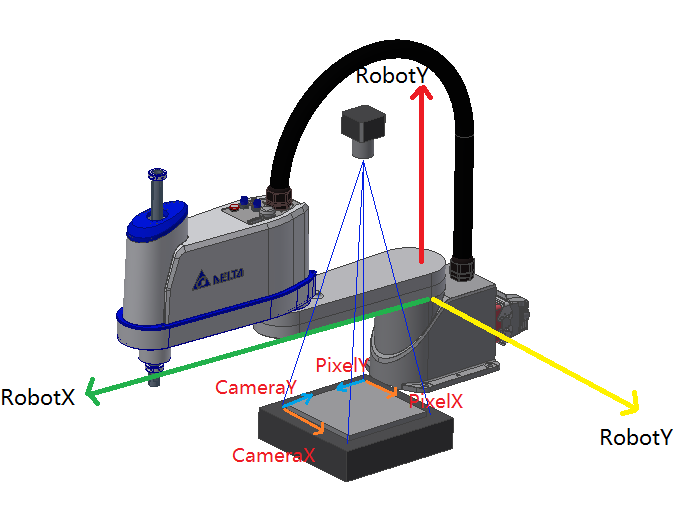
在很多行業,由于人工成本、生產效率以及精確性等各方面的因素,用SCARA機械手取代人工來搬運、加工和檢測是大勢所趨。“機械手”SCARA工業機器人具有占地空間小,精度高,速度快等特點,特別適用于3C電子組裝、涂膠、鎖螺絲、焊錫、插件、上下料等應用場合。而工業現場使用視覺時一般需要相機坐標系和機械手臂坐標系的轉化,這里介紹一種臺達SCARA機械手與相機坐標統一的說明,將工業相機的像素坐標與SCARA工業機器人坐標進行校準,建立轉換關系。
一、基本流程
1、相機通過以太網或串口與臺達SCARA工業機器人通訊,按校正函式的要求獲取相機發送過來的數據。
2、按照后面介紹的校準步驟,記錄臺達SCARA工業機器人校準點坐標與對應的視覺像素坐標。
3、使用校準函式,建立臺達SCARA工業機器人與視覺坐標之間轉換關系。
4、視覺工作時,將檢測到的工件坐標發送給臺達SCARA工業機器人,其根據坐標轉換關系,將像素坐標值轉換為自身坐標后再去進行抓取或裝配等動作。
二、準備工作
1、安裝相機,調整鏡頭焦距、光源至合適亮度(當相機位置移動或者焦距更改過,需重新校準)。
2、臺達SCARA工業機器人手參數檢查,確認手臂參數正確,否則影響校準精度。
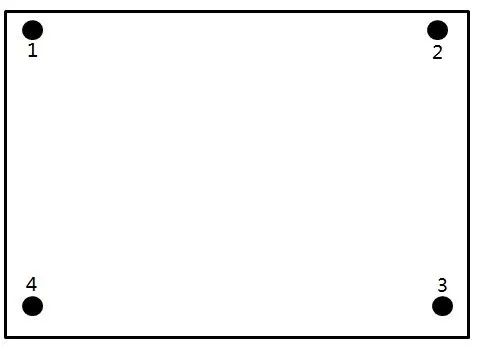
3、制作4點圖校準板,如下圖所示。
4、制作SCARA工業機器人工件坐標的校準工具,一般要求末端是尖端,方便對位,可穩定安裝在Z軸或抓手上。
三、相機安裝方式
1、固定安裝:相機固定向下/向上。
使用固定安裝,相機無法移動,拍攝范圍小,但是視覺檢測的時間一般可以與SCARA工業機器人工作的時間并列運行,節省節拍時間。
2、移動安裝:相機安裝至臺達機器人J4軸。
使用移動相機,相機隨SCARA工業機器人移動,拍攝范圍大,但是視覺檢測前,必須有一定的靜止時間(0.2s~0.5s)。視覺檢測時,SCARA工業機器人一般需要停止不動,不能進行其他工作,整體節拍時間會拉長。
四、校準步驟
相機固定安裝(向下)
- 使用四點圖校準板
- SCARA機器人末端安裝校準治具
- 示教治具末端的工具坐標Tool n
- 按照四點圖的順序,SCARA機器人末端依次對準4個位置,在DRAStudio中選擇對應的Tool n,并保存點位(如保存到P1~P4)
- 移開SCARA機器人,視覺識別四點圖上的4個點像素坐標,同樣按照四點圖順序,將其像素坐標XY依次保存(如保存到P5~P8)
相機固定安裝(向上)
- SCARA機器人可以在相機視野中移動,不需要四點圖校準板
- 在SCARA機器人治具上找一個視覺容易識別且唯一的特征點,建議圓形或圓孔。或SCARA機器人抓取需要識別的工件,在工件上找特征
- 使用DRAStudio,以上述特征點為Tool尖端,示教工具坐標Tool n
- 按照四點圖的順序,依次將特征點移動到相機視野中的左上→右上→右下→左下四個位置,共移動4次,并在DRAStudio中選擇對應的Tool n,并保存點位(如保存到P1~P4),同時視覺依次抓取4個特征點的中心像素值并保存(如保存到P5~P8)
移動安裝相機校準(相機安裝在J4軸)
- SCARA機器人末點安裝校準治具,并在相機工作視覺平面上找一個容易識別且唯一的特征點
- 示教校準治具末端的工具坐標Tool n
- 將治具末端對準特征點,在Tool n下保存該位置為P0
- 將相機移動到特征點上方,讓特征點按照四點圖的順序,即位于相機視野的左上→右上→右下→左下四個位置,并在DRAStudio中選擇對應的Tool n,并保存點位(如保存到P1~P4),同時視覺依次抓取4個特征點的中心像素值并保存(如保存到P5~P8)
五、校準函式
固定向下:iTrans = Point_Trans_CamDown(P1,P2,P3,P4,P5,P6,P7,P8)
固定向上:iTrans = Point_Trans_CamUp(P1,P2,P3,P4,P5,P6,P7,P8)
J4軸移動相機:iTrans = Point_Trans_CamJ4(P0,P1,P2,P3,P4,P5,P6,P7,P8)
輔助函式:Point(x,y)
校準參數保存于iTrans中
校準函式ret = Point_Calibrate(P,iTrans),其中返回值ret.x、ret.y為轉換后SCARA工業機器人值。其中相機固定向下或者固定向上安裝時,返回值ret.x、ret.y可直接使用;相機安裝于J4軸時,需要將返回值ret.x、ret.y分別與拍照位的機械手X、Y值相加,相加之后值即可使用。
六、范例程式
固定相機/向下、向上
v_x = 100 --拍攝工件的視覺坐標x
v_y = 100 --拍攝工件的視覺坐標y
P_t = Point(v_x,v_y) --轉換前視覺坐標為P_t
P_R = Point_Calibrate(P_t,iTrans) --轉換后的SCARA工業機器人坐標為:P_R
移動相機/ J4軸
移動相機拍照時,需要將機械手拍照的位置(Tool n)也計算進去
v_x = 100 --拍攝工件的視覺坐標x
v_y = 100 --拍攝工件的視覺坐標y
P_t = Point(v_x,v_y) --轉換前視覺坐標為P_t
P_tR = Point_Calibrate(P_t,iTrans) --轉換后的SCARA工業機器人坐標為:P_tR
P_R = Point (P_tR.x + Cam.x, P_tR.y + Cam.y) --轉換后SCARA工業機器人坐標加上拍照時SCARA工業機器人坐標等于工件實際坐標P_R
七、校準驗證
校準完成后,可以在相機視野中找任意一點,將其視覺坐標進行轉換,在對應的工具坐標下,讓SCARA工業機器人的工具末端運動到相應的位置,看是否準確到達,若達到,則表示視覺校準是準確的。
庫崎智能科技為臺達SCARA機器人代理商,為客戶提供完善的售后與保修服務,庫崎智能專注于可定制化服務與解決方案。在線客服免費熱線:15814107663(微信同步)
只要您的一個電話,或者一封郵件,庫崎智能科技為您解決后顧之憂。

