
有三種主要情況,UR機器人可能在移動到某個位置時遇到問題,或者因為機器人不可能到達所需的位置,或者因為它不可能從機器人關節的當前位置到達那里。在這里,我們將這些情況大致歸類為奇點,并逐一解釋。
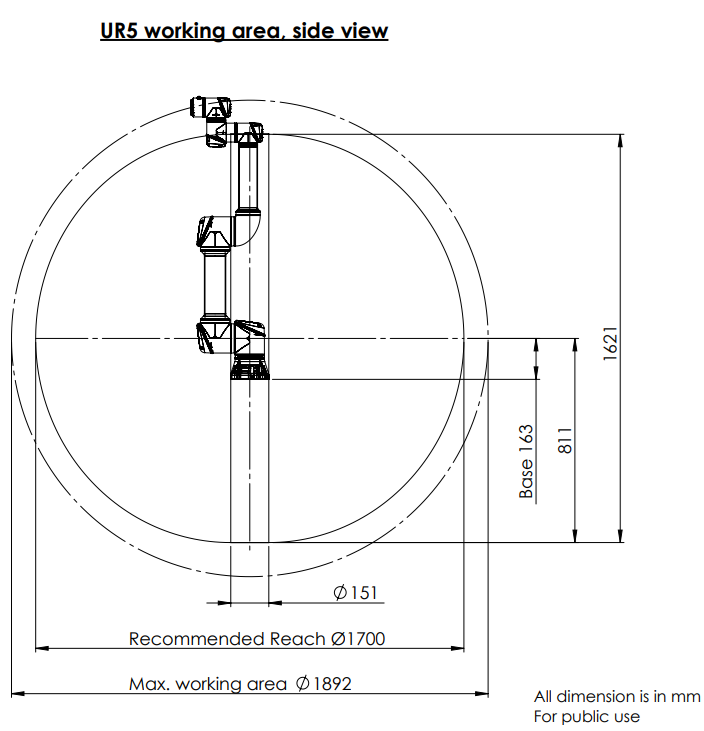
UR機器人工作區
UR機械臂的工作空間是球形的,在工作區域圖中,您可以在支撐點下找到它,它用兩個同心圓表示,一個較小的標記為“推薦范圍”,一個稍大的標記為“最大值”。工作區域”。在工作空間的中心,在基礎接頭的正上方和下方有一個柱子,在柱子內部也有一些限制機器人的運動。以下示例來自UR5e機器人工作區域圖,可在此處找到:UR機器人工作區域。
1、外部工作區限制
下面的動畫顯示在推薦的到達范圍內(以藍色表示),機器人可以將工具移動到幾乎任何方向的任何位置。當在推薦范圍之外的區域內工作但仍在最大工作區域內(以灰色表示)時,大多數位置都可以到達,但是對工具方向有限制,因為在某些情況下機器人在物理上無法達到足夠遠的距離。
怎么避免
將設備安排在機器人周圍以避免在推薦的工作空間之外工作,或者如果不可行,請選擇具有較長范圍的UR機器人。
2、內部工作區限制
建議避免機器人基座正上方和下方的柱子中的機器人運動(在下面的動畫中以灰色表示),因為由于關節在機器人手臂上的布局方式,許多位置/方向將在物理上無法到達。此外,您可能會遇到在此圓柱體外部空間中執行線性運動的問題(以橙色表示),因為相對較慢的工具速度需要基礎接頭的非常高的旋轉速度,從而使一些工具運動無法實現或不安全。
怎么避免
以這樣的方式布置機器人任務,即不必在中心圓柱體中或靠近中心圓柱體工作。如果這是不可避免的,請盡可能使用MoveJ而不是MoveL,因為這不需要運動轉換,也不受奇點影響。您還可以考慮將機器人底座安裝在水平表面上,以將中心圓柱體從垂直方向旋轉到水平方向,從而可能使其遠離任務的關鍵區域。
3、手腕對齊奇點
肩部,肘部和腕部1個關節都在UR機器人的同一平面內旋轉,如下面動畫中編號為1,2和3的箭頭所示。然而,當我們將腕關節2(在動畫中標記為4)的運動與這個相同的平面對齊時,通過將其移動到0度或180度的角度,我們限制了機器人的運動范圍,無論該區域是什么工作區。

怎么避免
以這種方式布置機器人任務,使得不必以這種方式對準機器人腕關節。或者偏移工具的方向,以便工具可以水平指向而不會出現有問題的手腕對齊。
您還在為應用而煩惱嗎? 現在聯系我們詳細了解,庫崎智能科技有限公司作為UR機器人指定經銷商,專注于可定制化服務與解決方案。在線客服和免費熱線:15814107663(微信同步)
公司主要提供:優傲協作機器人|MiR移動機器人|臺達SCARA機器人|Robotiq夾爪|Onrobot夾爪|復合機器人等主營業務。
適合應用場景有:汽車制造行業|3C行業|電子電氣|機械加工|半導體|食品加工行業|醫藥行業|化工行業|教育行業|娛樂生活|其他行業等領域
歡迎立即預約體驗,只要您的一個電話,或者一封郵件,庫崎智能科技為您解決后顧之憂。

