
Modbus 是一種軟件通信工具用于MiR移動機器人和其他設備之間進行通信,您可以根據需要啟用或禁用它。
Modbus TCP 可用于MiR 機器人和其他設備之間進行通信,以實現以下目的:
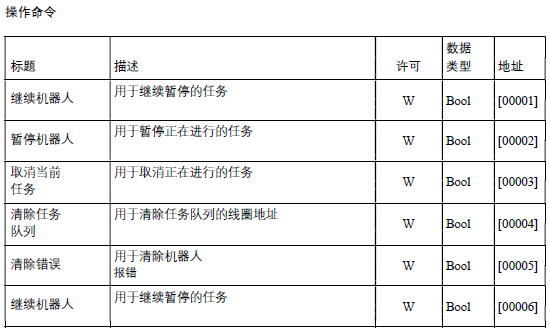
1、控制機器人的狀態,如暫停/繼續,取消當前的任務,清除任務隊列,清除錯誤消息;
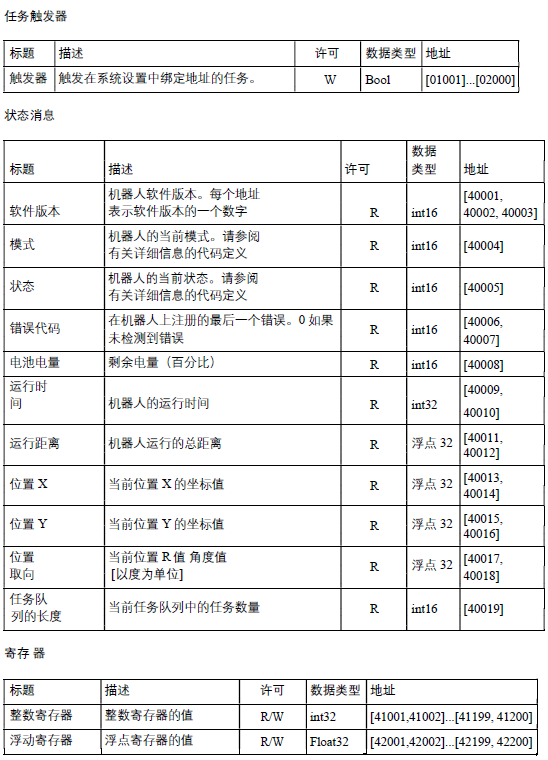
2、從機器人獲取基本信息,如狀態、電量百分比、錯誤消息等;
3、在機器人中讀取和寫入寄存器;
4、觸發任務;
Modbus 如何在 MiR移動機器人上工作?
Modbus 從站/服務器在機器人上運行,并將信息在本地網絡(192.168.12.X)或分配給MiR機器人的 IP地址段進行廣播,MiR機器人會在標準端口 502 上偵聽來自外部設備的命令。通常,設備將是一個 PLC 充當(master/client),MiR 機器人將是(slave/server)master/client 設備是負責輪詢數據的設備。
一般來說PLC(master/client)與MiR機器人(slave/server)建立連接,機器人等待來自 PLC 的傳入連接,建立連接后MiR機器人會響應 PLC 的查詢直到 PLC 關閉連接。
多個master/client 可以同時連接到機器人,每個連接都是以線程進行運行的。
緩存數據是為了避免API 上的高頻率請求負載,同時提供對任何請求的響應。
服務器可以響應以下功能代碼:
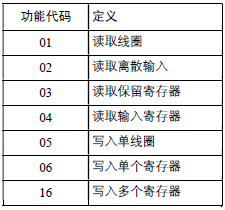
在 MiR 機器人中,線圈和離散輸入的內容相互匹配,輸入寄存器和保持寄存器也相互匹配。因此,您可以從它們獲取相同的數據,但您只能將信息發送到 Coil 和 Holding 寄存器。
數據類型:
1、尋址
o MiR機器人使用的 Modbus 地址可在下面的圖表中找到。
o Modbus 服務器使用0-based 的尋址方式。請注意,某些其他設備基于 1-based(例如 Anybus X-gateways),然后只需向該設備上的地址添加一個。(例如,機器人上的地址 3 將在 Anybus X網關上的地址 4)。
2、讀/寫方式
o 狀態信息:只讀。
o 寄存器:讀寫。
o 任務觸發器:可寫,如果正在使用觸發器返回值始終為 0。
o 操作命令:可寫,讀取返回值為 0。
3、整數寄存器
o 由于Modbus 通信編碼為 16 位,所以MiR 機器人將32bit 的整數數據存放在相鄰的兩個地址中,MiR Modbus 使用big endian 編碼作為默認配置。此方法應用于所有存放機器人信息的整數寄存器。
4、浮點寄存器
o MiR Modbus 使用 IEEE 754 ISO 標準對浮點值進行編碼。
Modbus 數據地址引用
設置 Modbus
要啟用機器人上的 Modbus 功能,請訪問系統 > 設置 > 功能并將 Modbus 設置為 True。滾動到頁面底部并保存設置。
默認情況下,您將能夠在 PLC 上設置 Modbus 主機,以獲取機器人的狀態消息并實現對機器人內部寄存器讀寫的操作,此外如果您需要使用觸發器功能來觸發任務,則需要按如下所述設置完成觸發器配置。
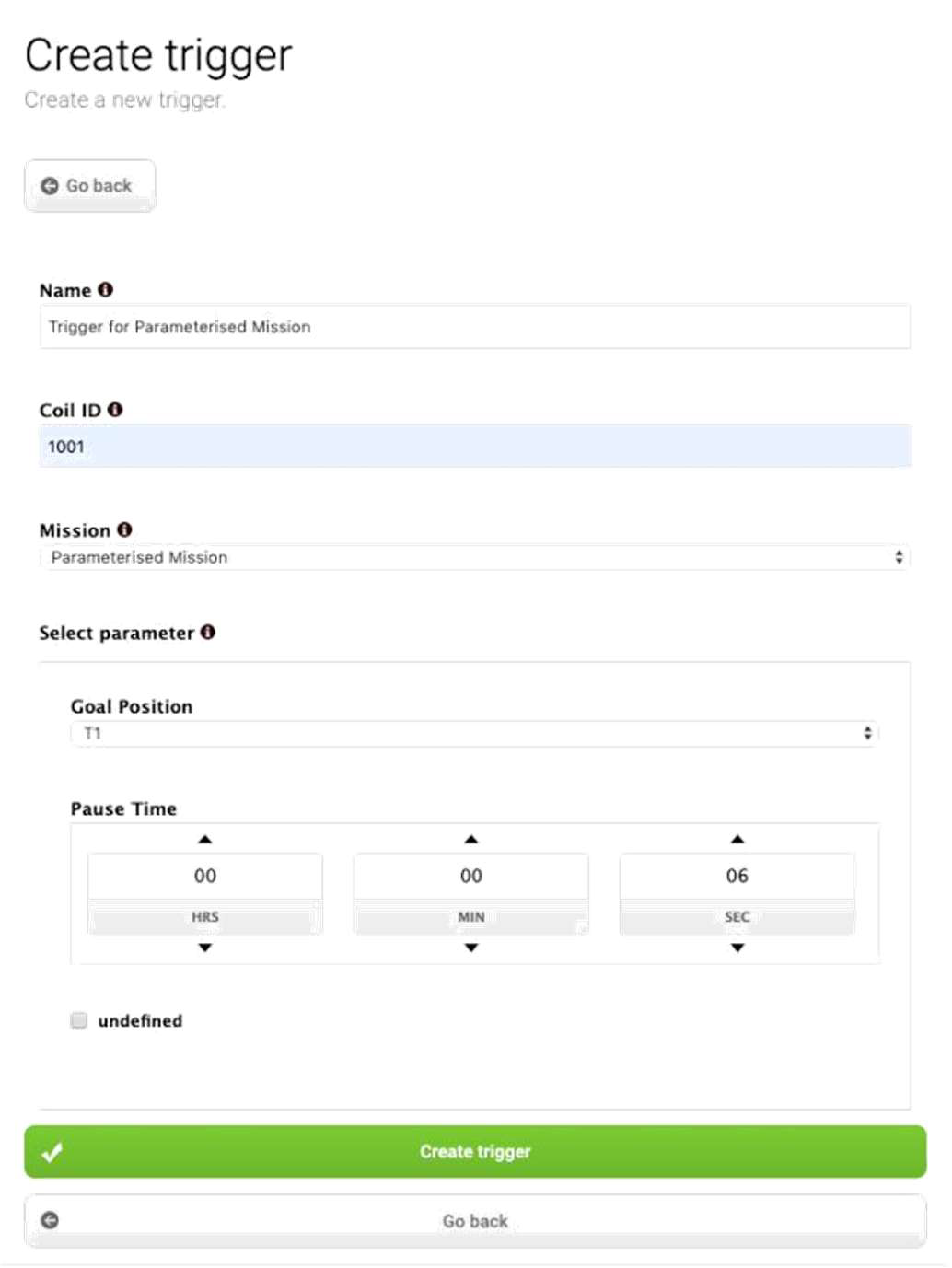
打開 Modbus 功能并創建任務后,轉到系統 > 觸發器 > 創建觸發器以創建新的觸發器。線圈 ID可以分配給 1001 和 2000 之間的任何整數。創建觸發器后,一旦通過 Modbus 將指定線圈設置為True,機器人將觸發任務。
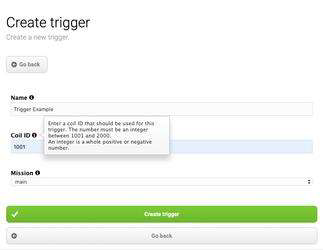
如果要在參數化任務(具有變量的任務)上設置觸發器,則必須在將其分配給線圈之前填寫所有變量,如下所示。
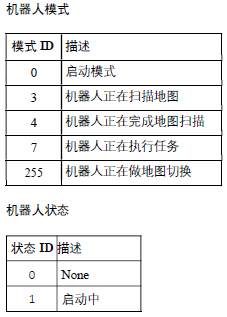
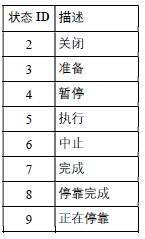
代碼定義
您還在為應用而煩惱嗎? 現在聯系我們詳細了解,庫崎智能科技有限公司作為MiR移動機器人指定經銷商,專注于可定制化服務與解決方案。在線客服/免費熱線:15814107663(微信同步)
公司主要提供:優傲協作式機器人|MiR移動機器人|臺達SCARA機器人|Robotiq夾爪|Onrobot夾爪|復合機器人等主營業務。
適合應用場景有:汽車制造行業|3C行業|電子電氣|機械加工|半導體|新能源|食品加工行業|醫藥行業|化工行業|教育行業|娛樂生活|其他行業等領域
歡迎立即預約體驗,只要您的一個電話,或者一封郵件,庫崎智能科技為您解決后顧之憂。
代碼定義
您還在為應用而煩惱嗎? 現在聯系我們詳細了解,庫崎智能科技有限公司作為MiR移動機器人指定經銷商,專注于可定制化服務與解決方案。在線客服/免費熱線:15814107663(微信同步)
公司主要提供:優傲協作式機器人|MiR移動機器人|臺達SCARA機器人|Robotiq夾爪|Onrobot夾爪|復合機器人等主營業務。
適合應用場景有:汽車制造行業|3C行業|電子電氣|機械加工|半導體|新能源|食品加工行業|醫藥行業|化工行業|教育行業|娛樂生活|其他行業等領域
歡迎立即預約體驗,只要您的一個電話,或者一封郵件,庫崎智能科技為您解決后顧之憂。

