
Remote TCP & Toolpath 是 Polyscope 5.6 中用于URe系列機器人的 URCap。
本文介紹如何使用 UR3e機器人設置桌面演示,以此展示 URCap 啟用的遠程 TCP 工具路徑移動。
示例適用于:e 系列軟件版本:5.6.0.90886
請注意,較舊或較新的軟件版本可能表現不同。此示例僅可用于 URe 系列。
請為本次演示準備以下物品
1、UR3e 機器人牢固地安裝在桌子上。
2、Fancort Industries 的點膠頭(經過認證的 UR+ 合作伙伴)或任何其他可用作遠程 TCP 的尖端工具。
3、可以連接到機器人工具法蘭的尖頭工具。
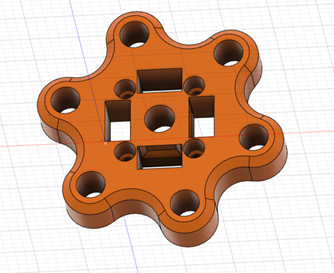
4、3D打印工件。
5、G代碼工具路徑文件。
6、程序和安裝文件。
程序:RTCP_Toolpath_Demo.urp
安裝:RTCP_Demo.installation
在繼續之前,請了解如何執行以下操作。有關詳細說明,請參閱 POLYSCOPE 用戶手冊中的導入程序和安裝文件和設置 MoveJ 航路點。
設置程序
1. 3D打印工件副本。
2. 將UR3e機器人牢固地安裝在桌面上。
a)升級到 Polyscope 5.6 或更高版本。請從此頁面下載安裝程序:https ://www.universal-robots.com/download/?option=41809#section41493
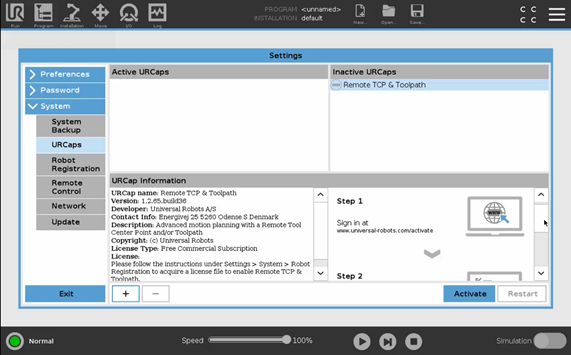
b)按照說明注冊機器人以激活嵌入式遠程 TCP 和工具路徑 URCap。(菜單 -> 設置 -> 系統 -> URCaps)
步驟 1. 登錄www.universal-robots.com/activate
步驟 2. 將注冊文件下載到您的 USB 驅動器
步驟 3. 將 USB 驅動器插入示教器并點擊激活以加載注冊文件
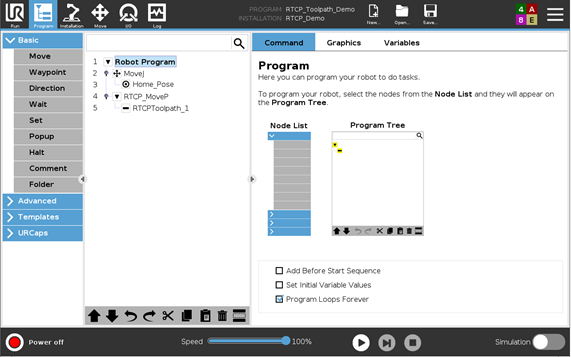
3. 將隨附的程序和安裝文件下載到您的 USB 驅動器并將它們導入 Polyscope。打開程序文件。
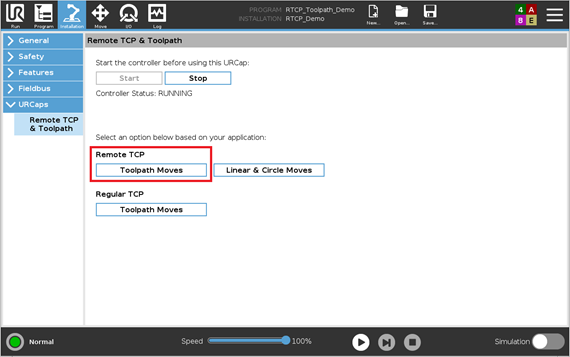
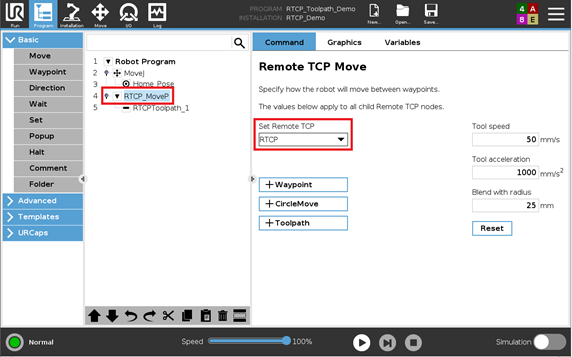
4. 在 Remote TCP & Toolpath URCap 中選擇 Remote TCP Toolpath Moves 并通過嵌入式說明了解工作流程。
5. 將名為RTCP_Demo.nc的 G 代碼工具路徑文件下載到 USB 驅動器的根目錄,并將其導入 Polyscope。
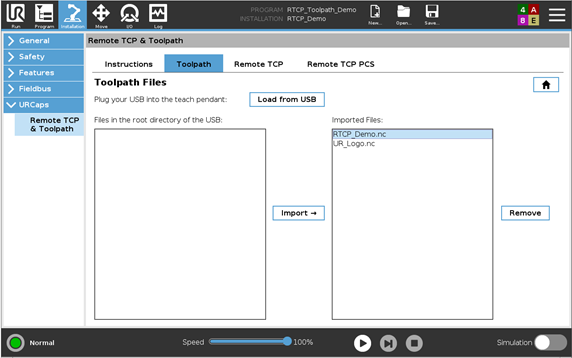
6. 將 Fancort 點膠頭安裝在機器人旁邊。
確保點膠頭指向機器人底座中的負 Z 方向,并且在機器人可觸及的范圍內。
在此示例中,分配頭安裝在水平鋁擠壓件上。
7. 將鋒利的工具安裝到機器人工具法蘭上。
不必將其配置為 TCP。
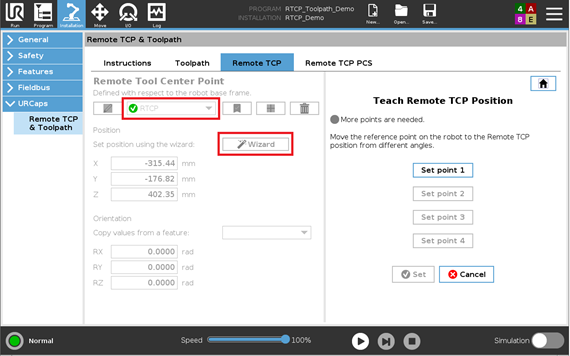
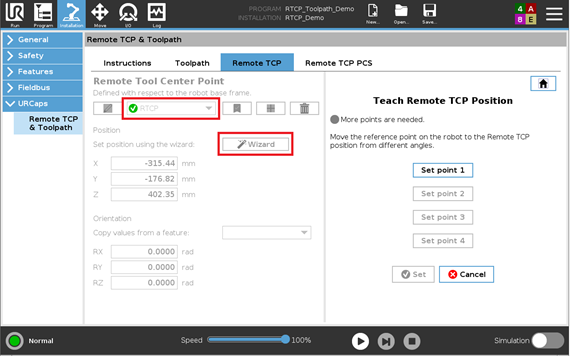
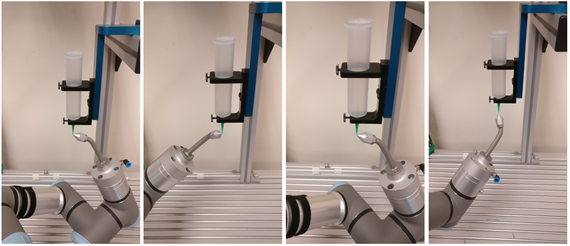
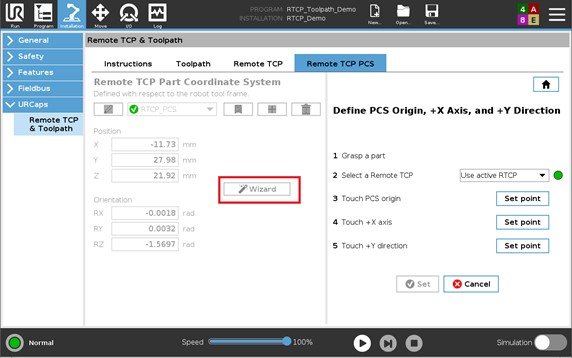
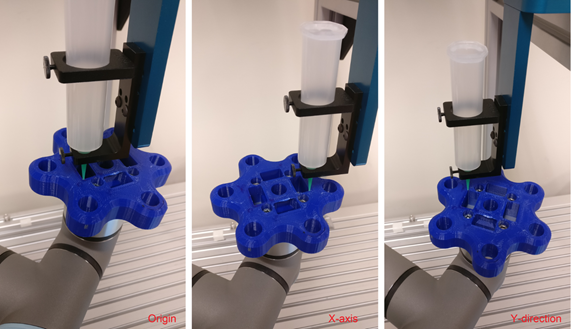
8.使用向導重新配置名為RTCP的遠程 TCP 。
9. 將工件安裝到機器人工具法蘭上。
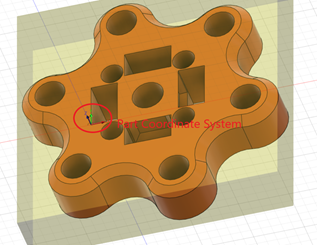
10.根據下圖重新配置RTCP_PCS 。
11. 進入程序。將Home_Pose設置為稍微遠離點膠頭。
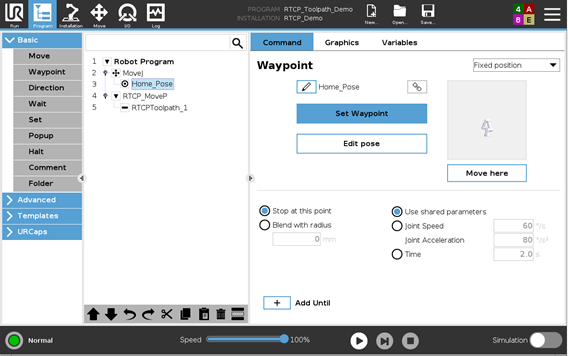
12. 確保選擇了正確的 Remote TCP、PCS 和 Toolpath 文件。

13. 以低速運行程序以驗證預期的運動。
您還在為應用而煩惱嗎? 現在聯系我們詳細了解,庫崎智能科技有限公司作為UR機器人指定經銷商,專注于可定制化服務與解決方案。在線客服/免費熱線:15814107663(微信同步)
公司主要提供:優傲協作式機器人|MiR移動機器人|臺達SCARA機器人|Robotiq夾爪|Onrobot夾爪|復合機器人等主營業務。
適合應用場景有:汽車制造行業|3C行業|電子電氣|機械加工|半導體|新能源|食品加工行業|醫藥行業|化工行業|教育行業|娛樂生活|其他行業等領域
歡迎立即預約體驗,只要您的一個電話,或者一封郵件,庫崎智能科技為您解決后顧之憂。
您還在為應用而煩惱嗎? 現在聯系我們詳細了解,庫崎智能科技有限公司作為UR機器人指定經銷商,專注于可定制化服務與解決方案。在線客服/免費熱線:15814107663(微信同步)
公司主要提供:優傲協作式機器人|MiR移動機器人|臺達SCARA機器人|Robotiq夾爪|Onrobot夾爪|復合機器人等主營業務。
適合應用場景有:汽車制造行業|3C行業|電子電氣|機械加工|半導體|新能源|食品加工行業|醫藥行業|化工行業|教育行業|娛樂生活|其他行業等領域
歡迎立即預約體驗,只要您的一個電話,或者一封郵件,庫崎智能科技為您解決后顧之憂。

