
從開箱開始
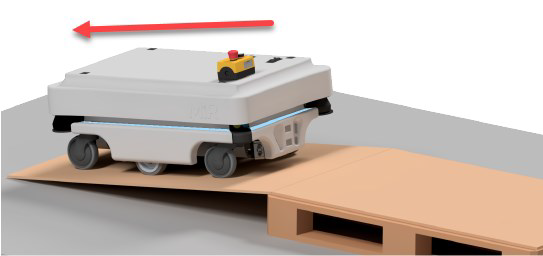
打開運輸用木箱后,可將頂板放置在托板后方作為斜坡供小車行駛到地面(注意:出廠的運輸木箱可供重復使用,建議保留)。

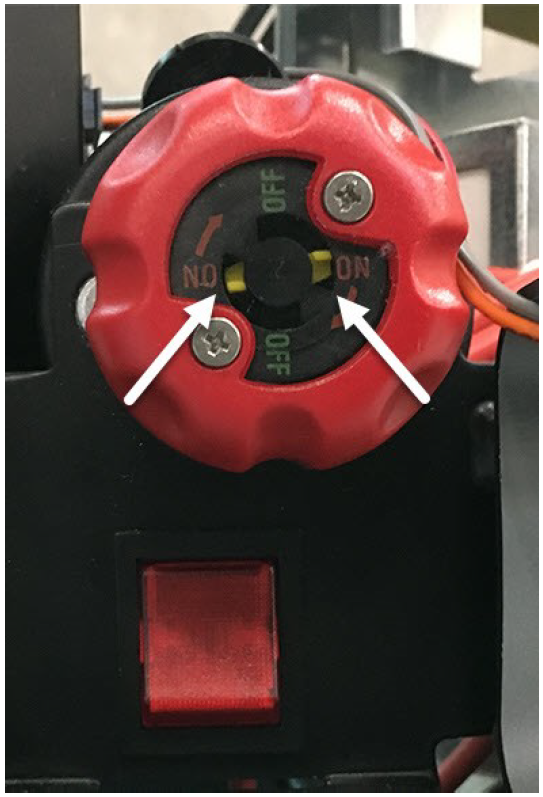
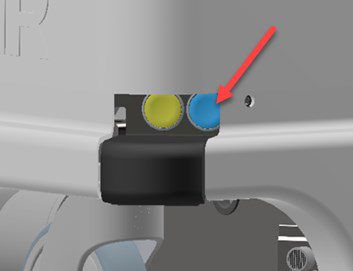
開機前,需要確認整車的電源開關是否均已打開。排查順序:電池接插件→車前斷路器→車尾電源開關。


連接急停按鈕盒,天線并按下開機鍵。


待急停盒復位指示燈亮起后按下,打開終端設備(手機/Pad/PC)的WIFI功能并搜索連接至車內自帶熱點MiR_XXX。
使用界面上的虛擬搖桿控制MiR行駛到地面(初次操作者建議小幅度推動搖桿來適應速度)。

掃描地圖
MiR內置SLAM導航技術,通過實時匹配激光數據與地圖數據來實現精準定位。因此,記錄地圖作為使用MiR的第一步驟以外,同時會影響MiR在后續使用過程的重要元素。
在繪制地圖之前請確認繪制地圖的算法為:Carthographer。

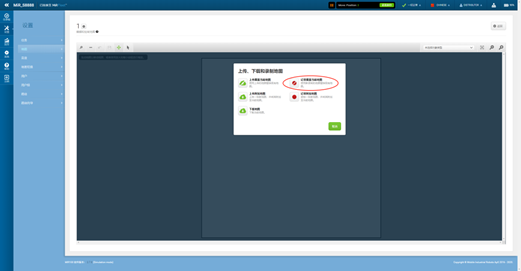
進入地圖錄制界面,點擊記錄覆蓋當前地圖:
使用搖桿驅動機器人并開始錄制地圖。錄制過程中建議先錄主線,后錄分支,最后返回錄制起始位置形成一個完整閉環。錄制完的地圖需要旋轉對齊,使路徑與地圖的X-Y軸方向一致。

一個簡單循環
在完成地圖的繪制后,如何讓MiR自主地運行起來呢?最快捷的方式就是簡單的在地圖上添加幾個位置并編輯一個點位間循環運輸的任務。
創建點位
菜單欄:設置-地圖,選擇我們剛才掃描的地圖即可進入地圖編輯界面,右上方下拉欄選擇位置屬性并點擊左上方的【創建】,點位的位置可以直接通過鼠標點擊或者直接輸入坐標方式添加。

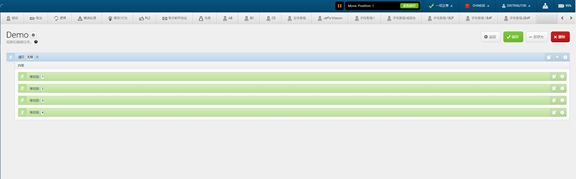
創建任務
菜單欄:設置-任務,點擊進入任務編輯界面。這里我們用一個無限循環內嵌套了4個動作指令作為實例,這也是比較常見的在客戶現場初次演示Demo使用的任務。
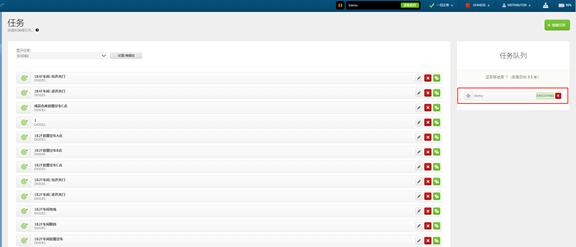
執行任務
菜單欄:設置-任務,界面中找到我們剛才編輯的任務點擊,開始運行。同時你可以在任務隊列中看到這個任務的運行狀態。
您還在為應用而煩惱嗎? 現在聯系我們詳細了解,庫崎智能科技有限公司作為MiR移動機器人指定經銷商,專注于可定制化服務與解決方案。在線客服/免費熱線:15814107663(微信同步)
公司主要提供:優傲協作式機器人|MiR移動機器人|臺達SCARA機器人|Robotiq夾爪|Onrobot夾爪|復合機器人等主營業務。
適合應用場景有:汽車制造行業|3C行業|電子電氣|機械加工|半導體|新能源|食品加工行業|醫藥行業|化工行業|教育行業|娛樂生活|其他行業等領域
歡迎立即預約體驗,只要您的一個電話,或者一封郵件,庫崎智能科技為您解決后顧之憂。

