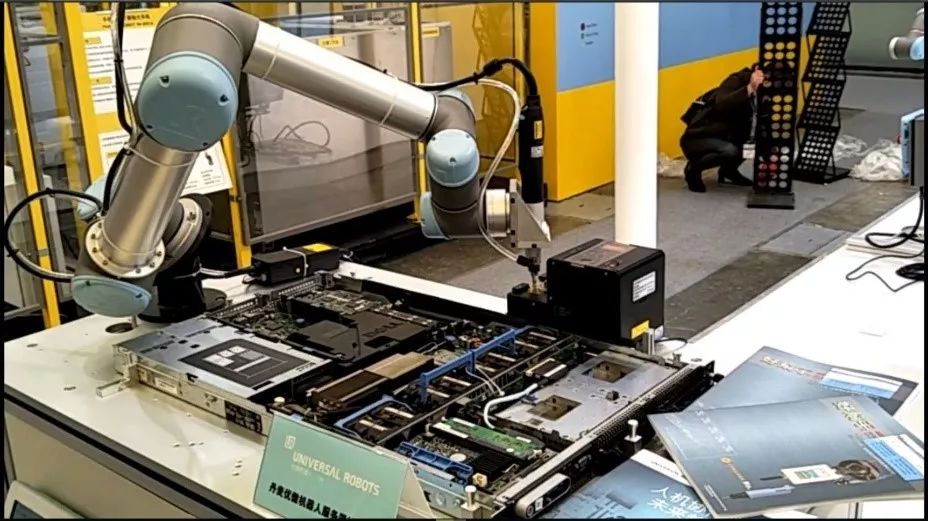
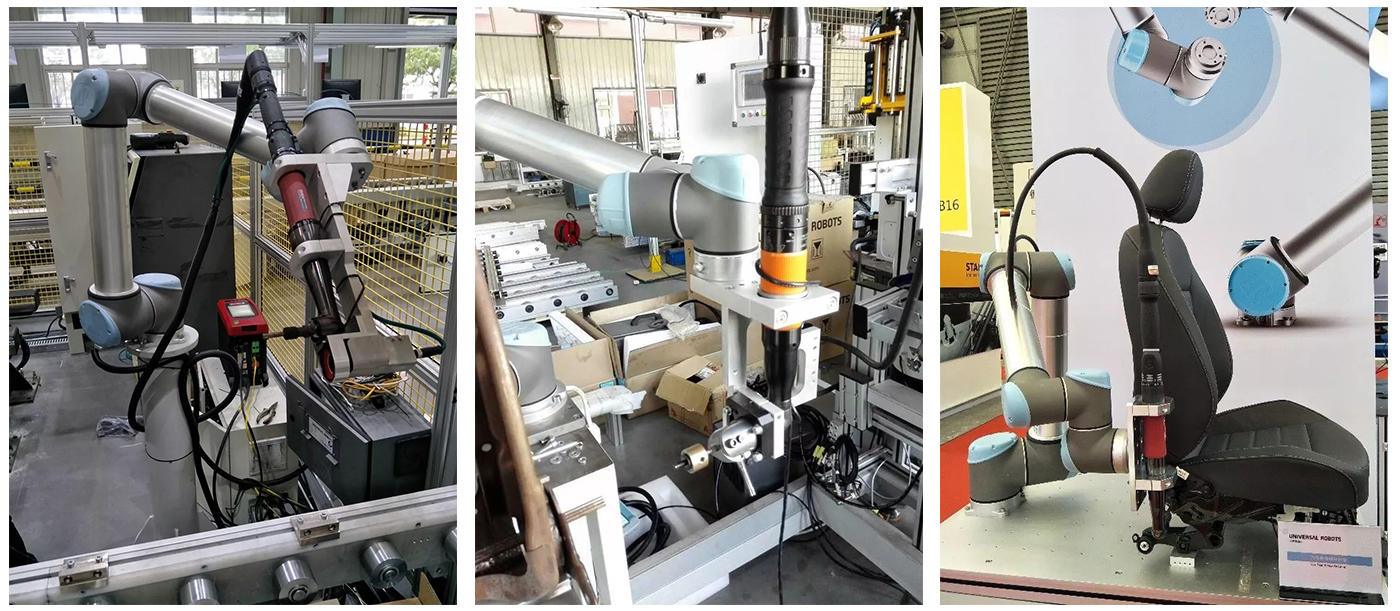
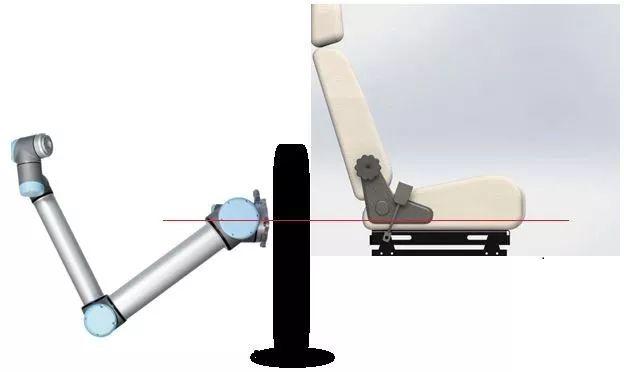
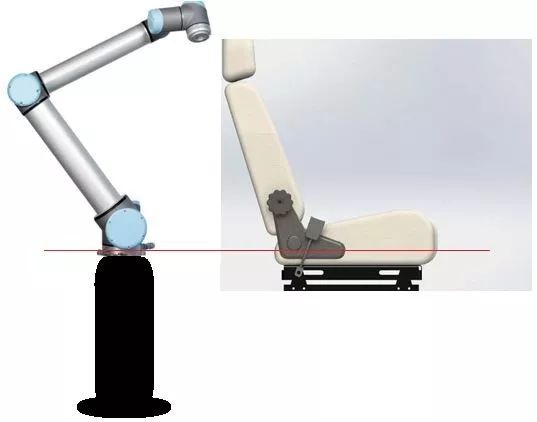
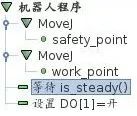
UR3末端關節可以無限旋轉,可以有效完成螺絲擰緊操作。e系列機器人內置力/扭矩感應功能,可以直接部署在螺絲擰緊應用中,無需使用昂貴的帶扭矩控制功能的螺絲擰緊工具。優傲機械臂的可重復性低至+/-0.03毫米(30微米),是快速準確裝配的理想之選。首先視覺系統拍照得到螺絲孔的位置,通過socket通訊將位置數據傳輸給UR機器人,UR機器人引導擰緊槍批頭的插入到螺絲孔中;然后UR機器人發送給擰緊槍啟動信號,擰緊槍轉動到達指定的扭矩值;后擰緊槍反饋完成信號,UR機器人再返回到安全等待位置。UR機器人六關節的超高自由度,工作空間是一個完整的球體,可以滿足發動機在各個方向擰緊螺絲的需求。
獲取更多信息:15814107663 立即咨詢>>
立即咨詢>>

copyright (?) 2021 東莞市庫崎智能科技有限公司 粵ICP備:17066985號 技術支持:麥田網絡