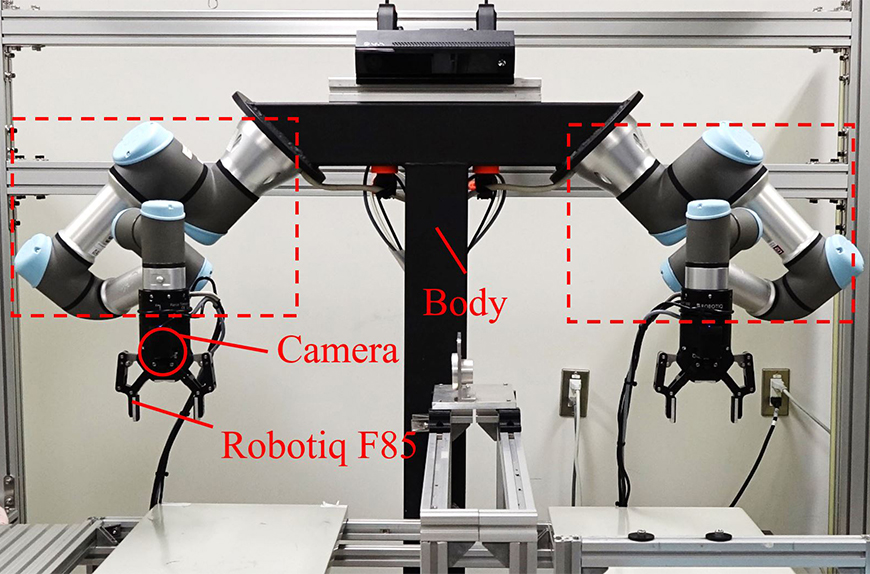
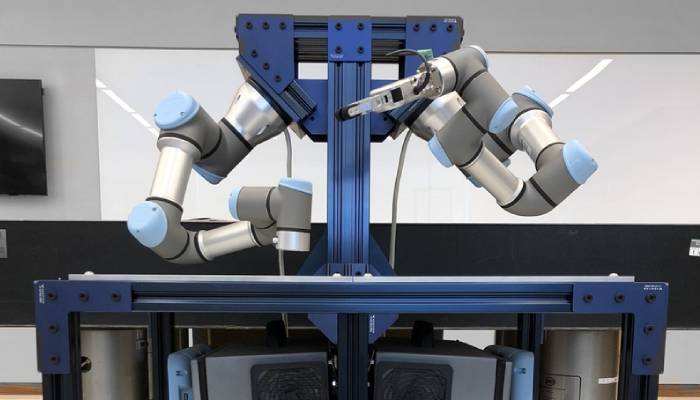
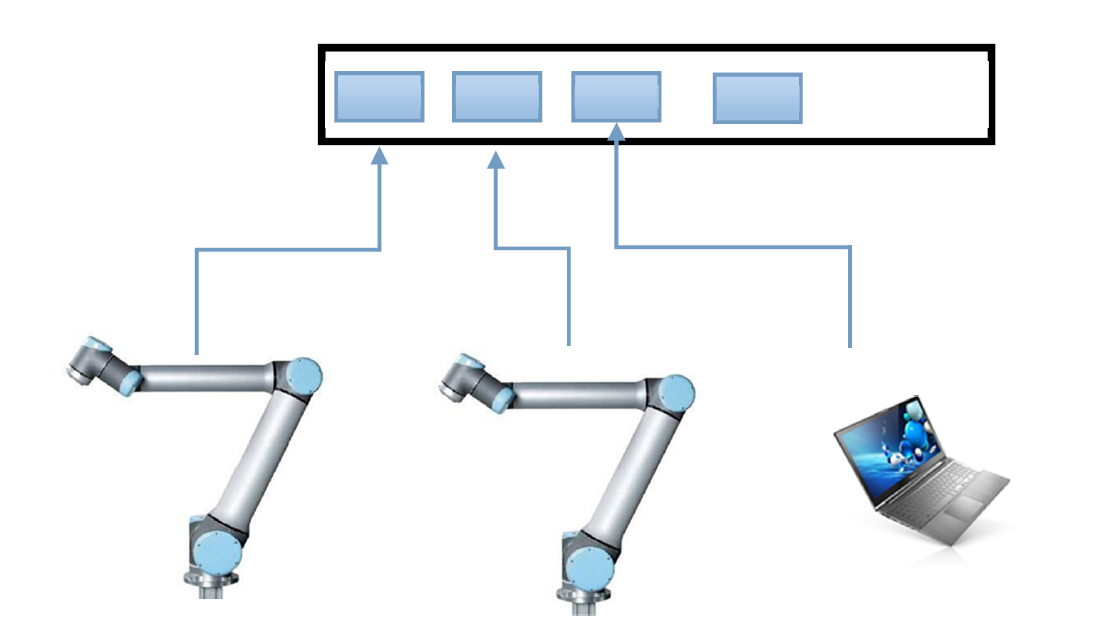
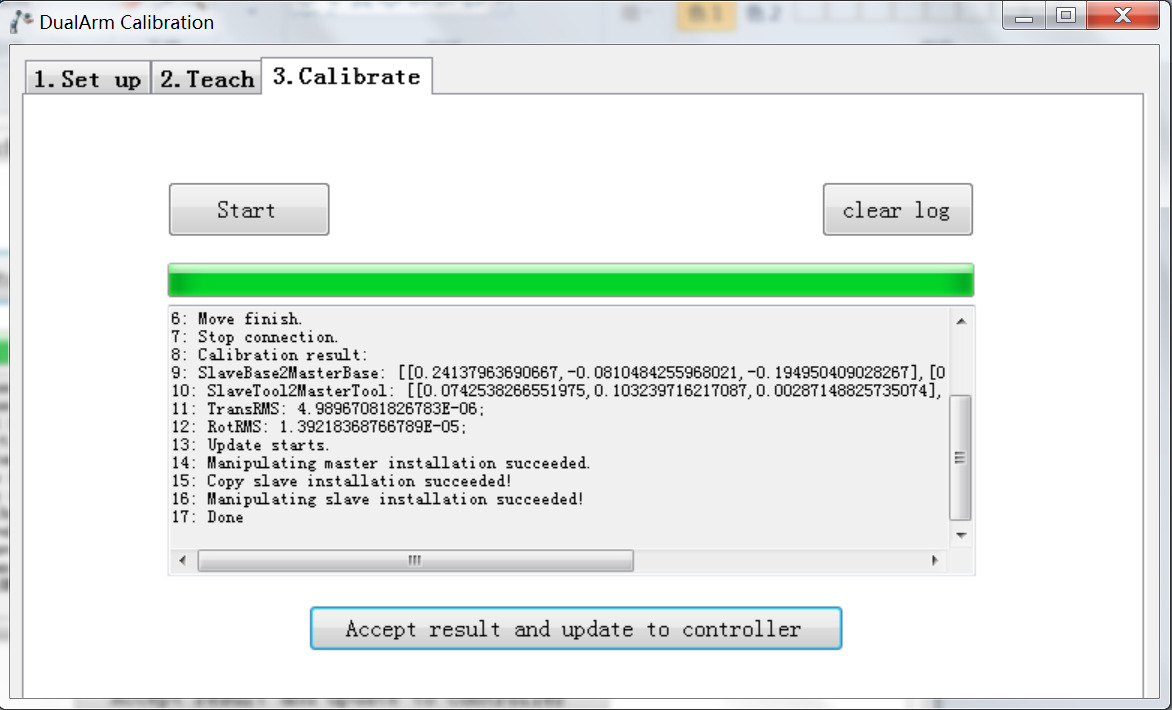
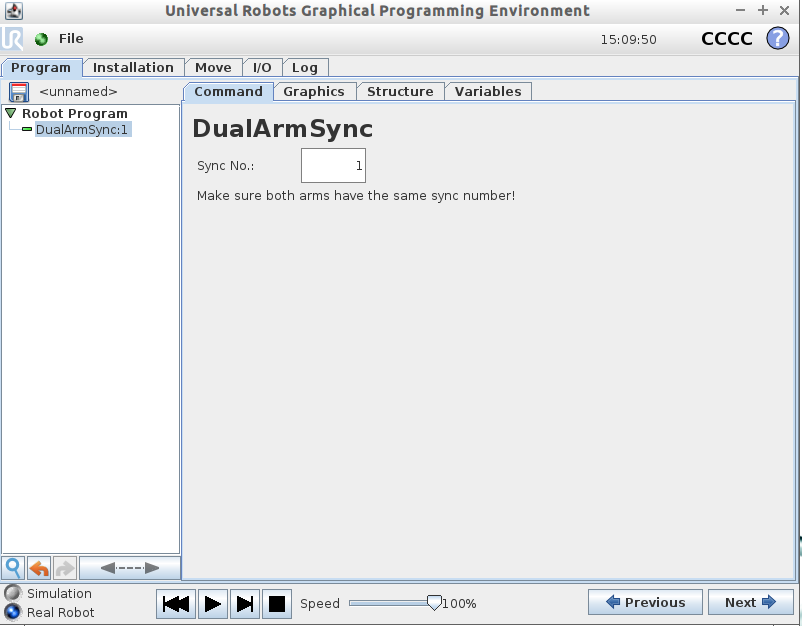
UR雙臂機器人的兩個手臂,既可以單獨運行,也可以協同工作。從技術特點來說,優傲雙臂機器人是由UR3/UR3e、UR5/UR5e、UR10/UR10e、UR16e任意兩款或者同一款的兩臺機械臂組成,用戶可以根據實際生產需要選擇不同的機械臂進行搭配。同時,雙臂協作應用支持任意角度安裝,可以滿足不同空間和負載的需求,具有非常高的靈活性;結合URCap 雙臂插件和標定軟件即可實現雙臂共享坐標系,協同操作。一個工作站讓用戶有了多種選擇,提高了設備利用率,可以最大程度實現柔性生產。
獲取更多信息:15814107663 立即咨詢>>
立即咨詢>>
| 序號 | 品牌 | 型號 | 數量 | 備注 |
| 1 | 優傲機器人 | UR5機器人 | 2 | 機器人系統版本號要求Version 3.2.x.x及后續版本 |
| 2 | 工業級交換機或者路由器 | 至少3個網口 | 1 | IP防護等級根據具體的應用需求定 |
| 3 | Cat7類屏蔽網線 | 3 | ||
| 4 | 24V信號線 | 5 | ||
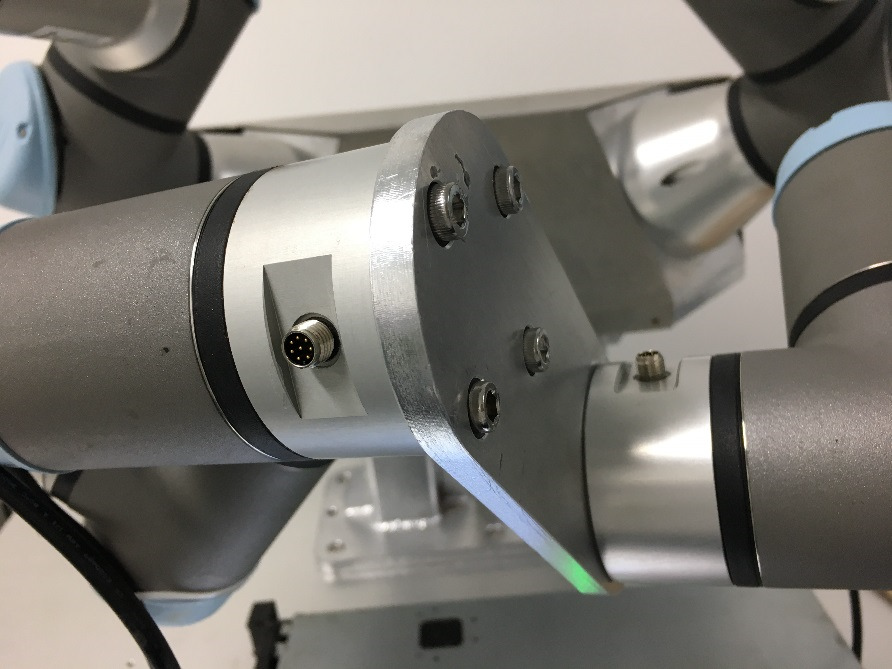
| 5 | 法蘭鏈接件 | 機加工 | 1 | 固定兩臺機器人的法蘭(標定用),無需標定則不需要 |

 |
 |
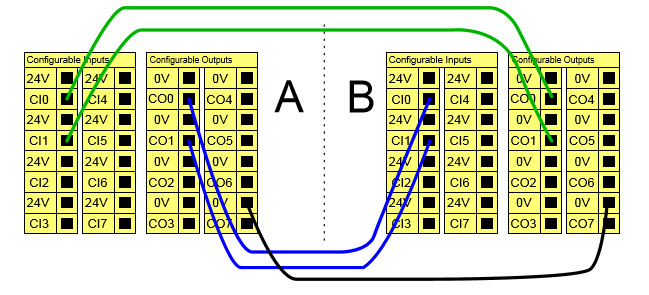
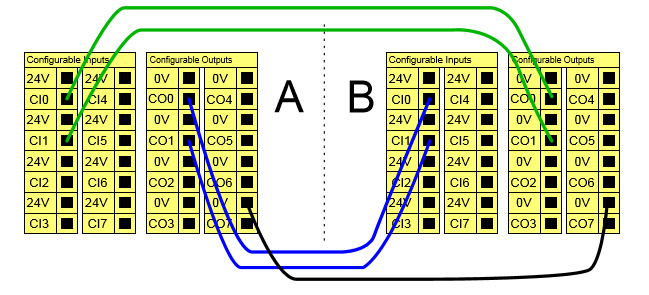
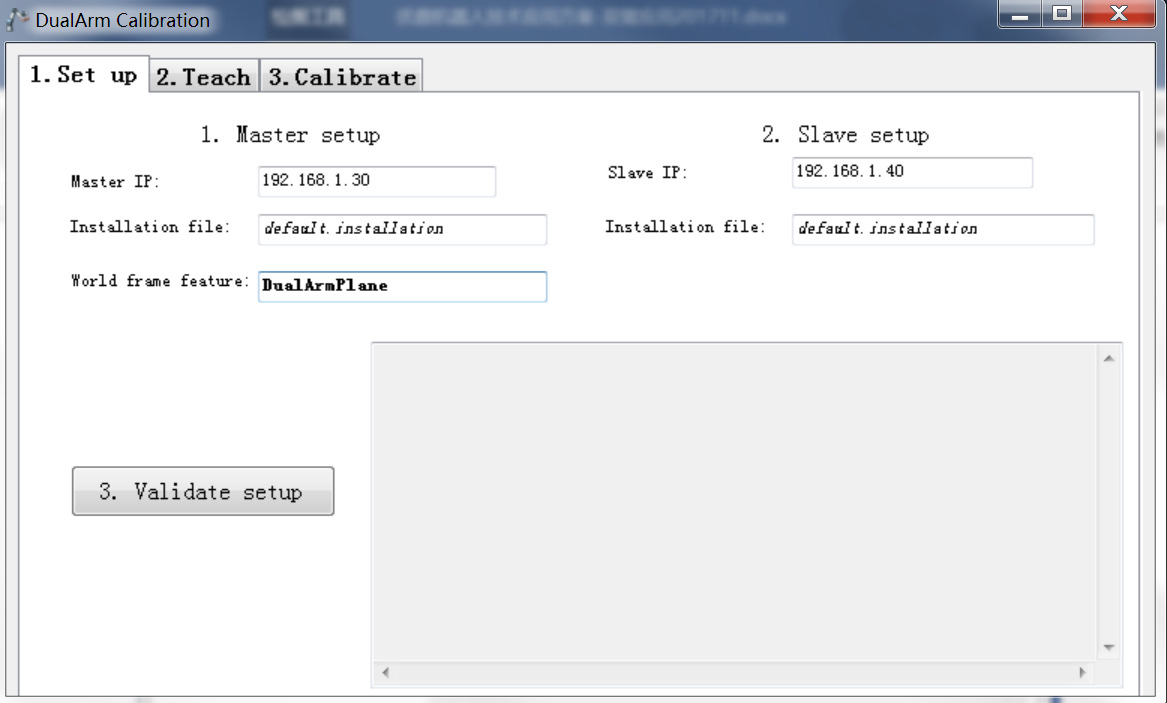
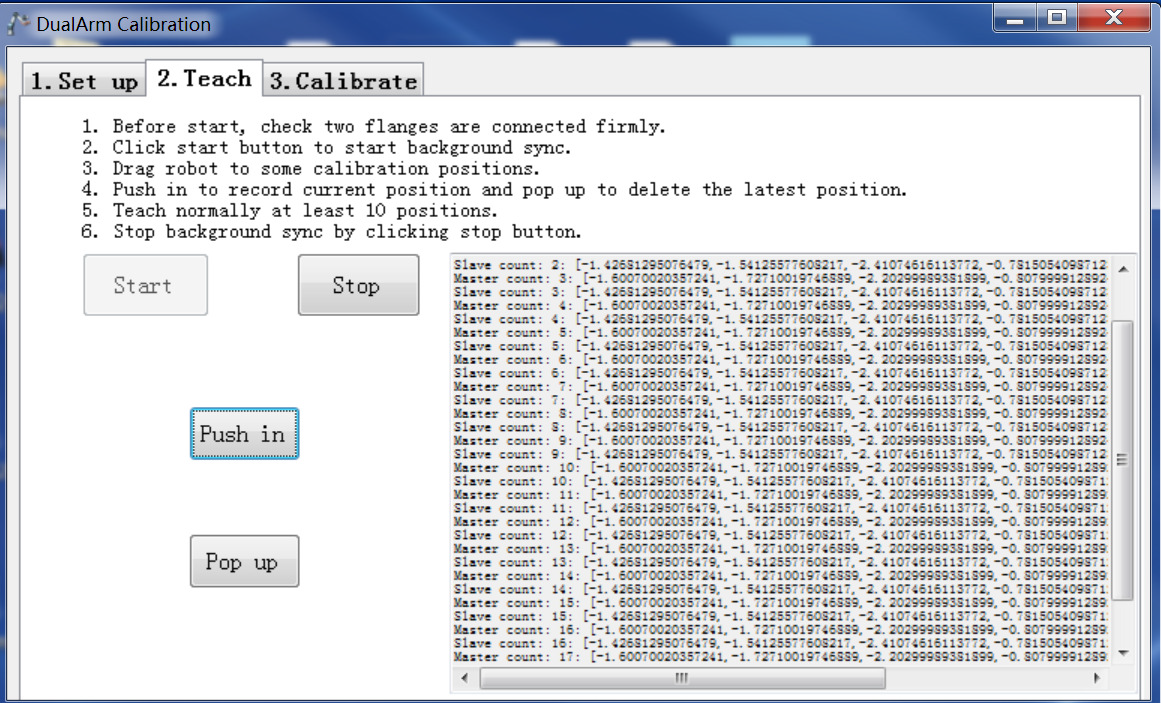
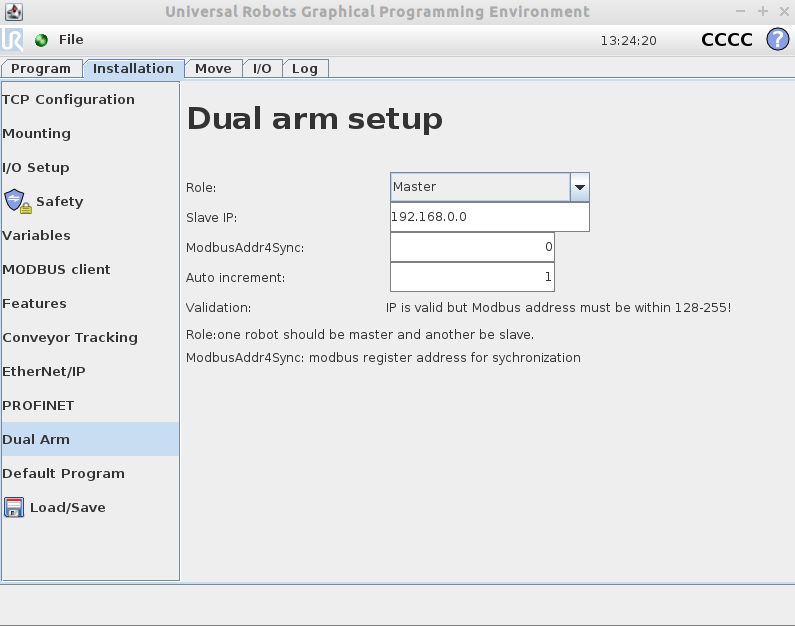
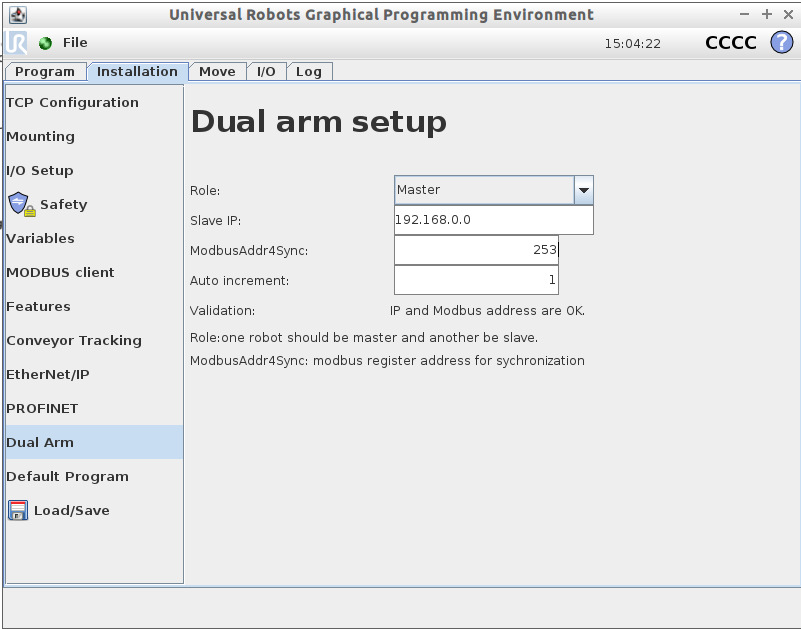
| (1) | (2) |
 |
 |
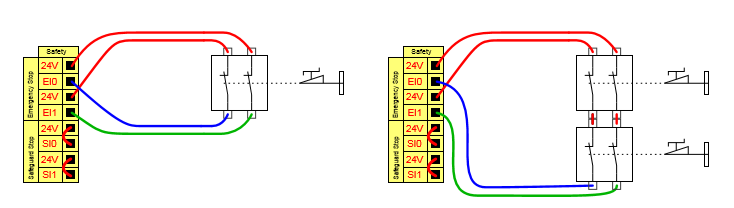
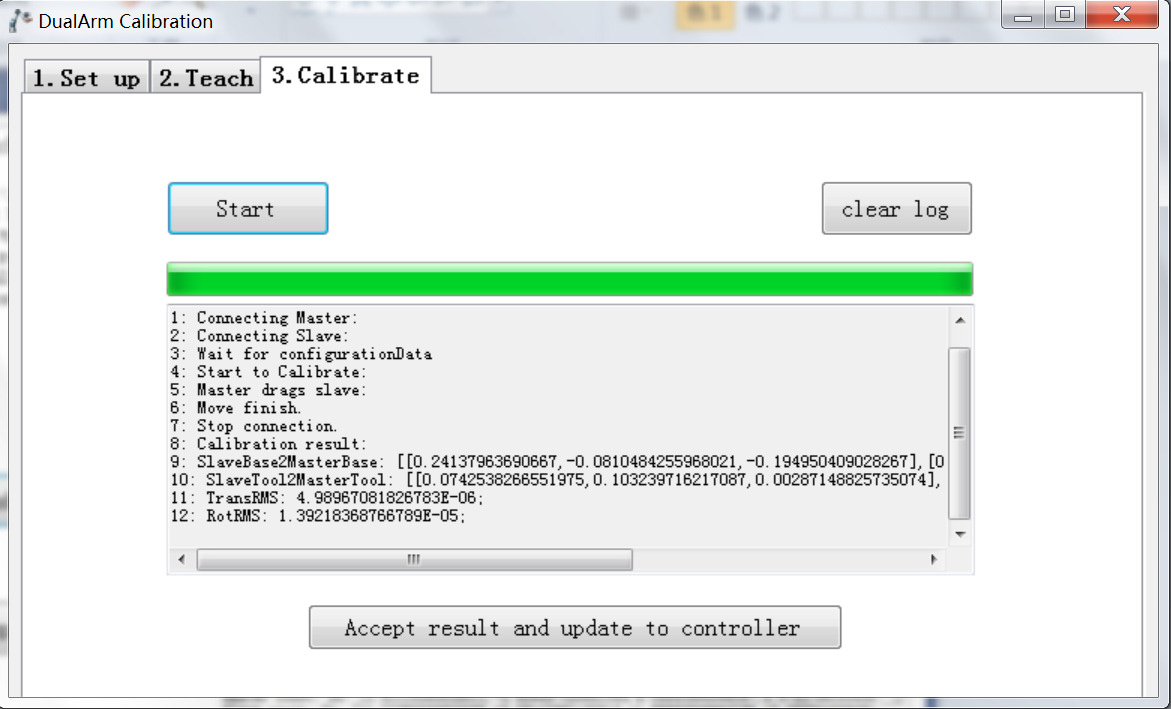
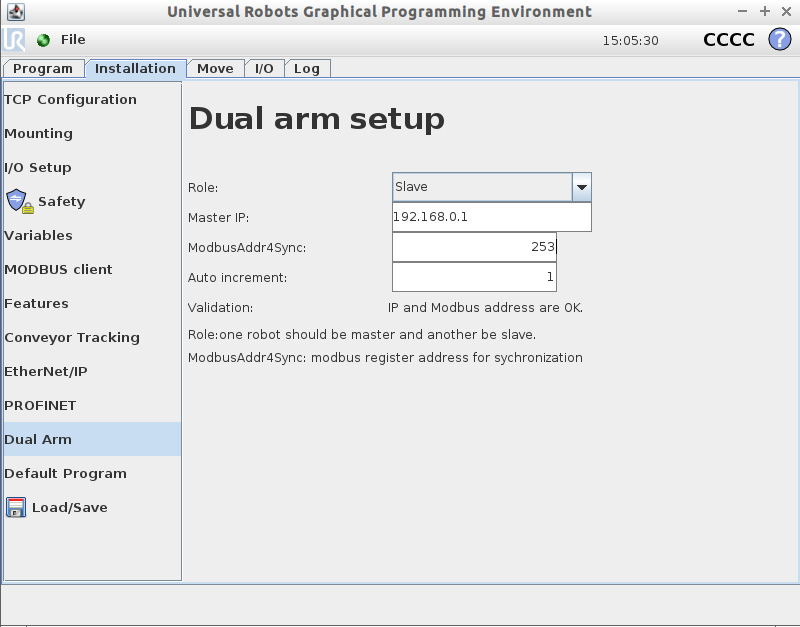
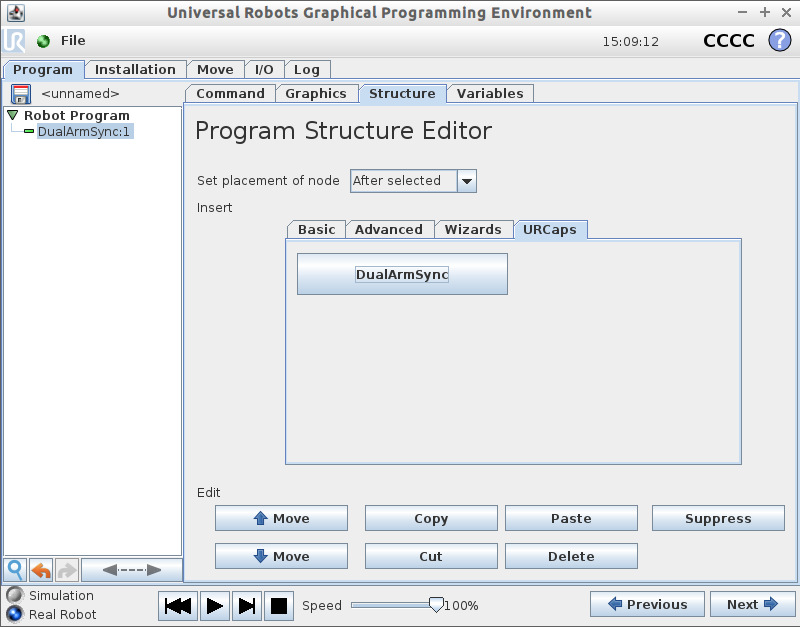
| (3) | (4) |
copyright (?) 2021 東莞市庫崎智能科技有限公司 粵ICP備:17066985號 技術支持:麥田網絡